





We are fascinated by the shape-shifting abilities of responsive materials and the dynamic interactions that come with it. The visual, proprioceptive and haptical stimuli arising from practical work with the materials served as starting point for us to investigate exoskeleton systems for rehabilitation, as a design probe together with the ZHAW School of Engineering. Our background and perspective brought us into designing wearable actuators from soft and solid material composites.
Recent research on soft actuators have overcome some constraints and limitations of robotics systems relying on rigid components. These organic robotic systems render the responsiveness of soft materials in ways that allows improved integration and response with human actions. Concerning the shoulder, or more explicitly the abduction-adduction movements of the shoulder, our soft actuated wearable devices are aimed to take advantage of natural anatomical structures, including joints and bones. In order to do this, we needed to dive into the anatomy of the human body. We did this first through drawings and sketches to understand where the devices could be worn to perform actuations.
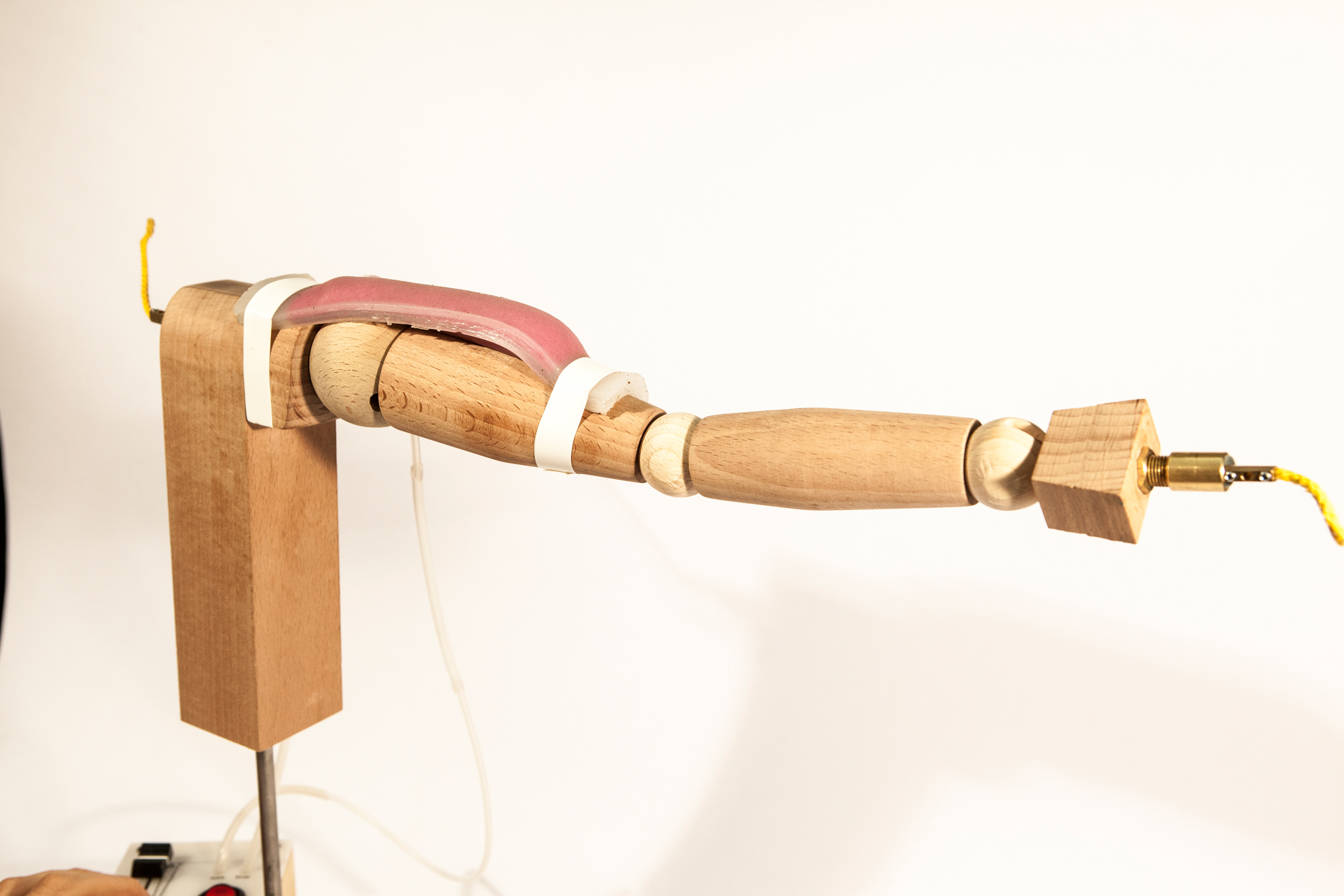
Anatomical and physiological research and the study of the individual parts in mechanical activity gave us hints on how to adapt granular-jamming, mcKibben muscles and pneu-net actuators to support arm movement. Emphasizing the musculoskeletal system, the reduced muscular performance after surgery with its tendons and bone connections gave us further perspective for the technical planning of soft actuator for orthotic shoulder aids. Based on the anatomical studies we built a wooden model of the arm and shoulder in a 1:2.5 scale of an adult male. This allowed us now to proportionally apply different soft actuators and test how it can elevate the arm or hold it in position.
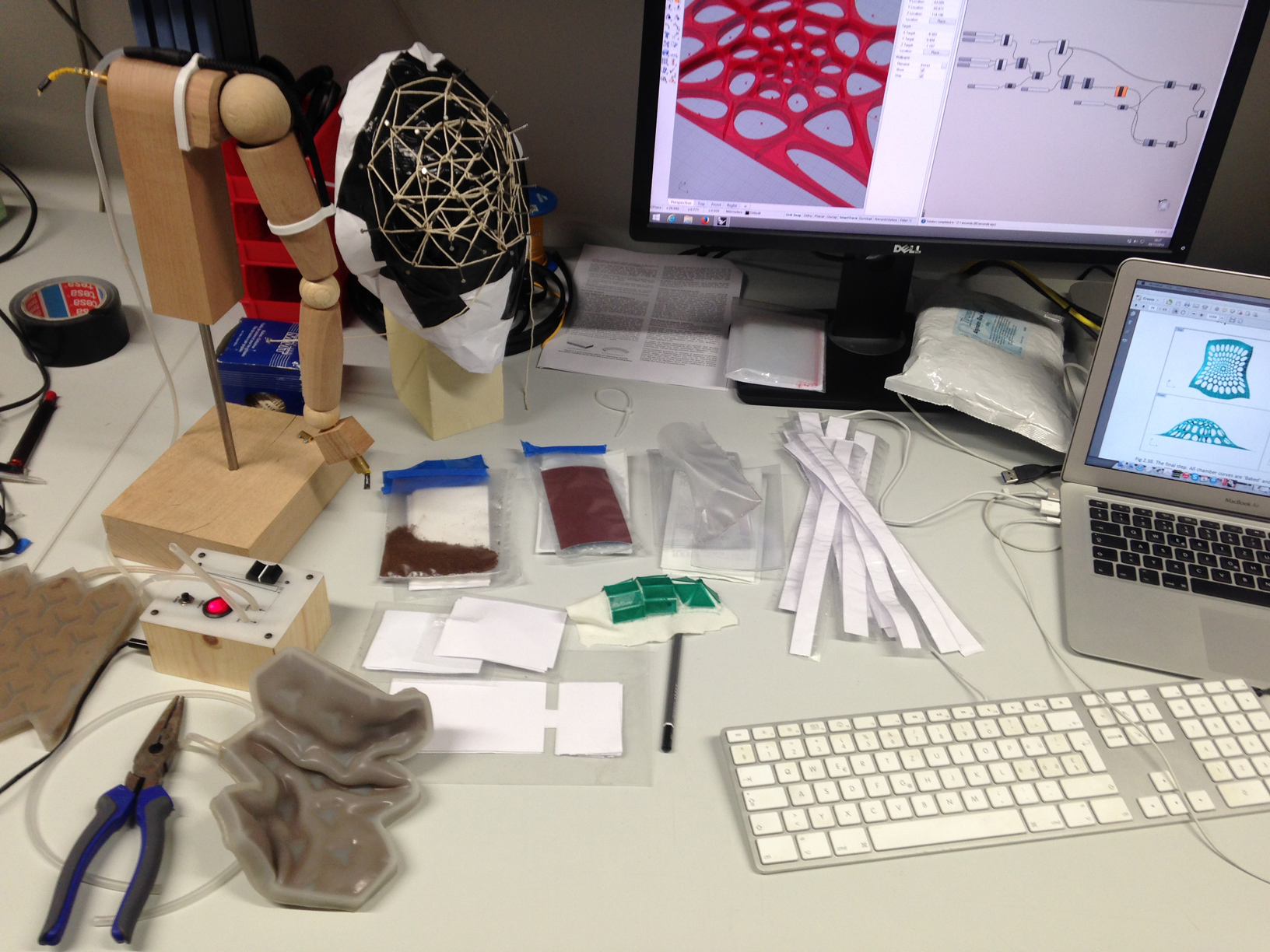
Besides drawings and model making, we investigated into different quick prototyping methods to get a sense of the topic, which was completely new for us. Through experimentally inflating and deflating balloons between the underarm and the torso, using foam, clay and paper models as rough shoulder equivalents gave us first tangible pieces to grasp on.
From a designers perspective, seeing the movement of the soft prototypes on the wooden model and questioning for example the kinematic degrees of freedom the arm has, brought us later on into thoughts about origami-like structuring the surface of the soft actuators to restrict movements in certain directions and furthermore react on linear and angular misalignments. Another area of exploration could be comfort and humidity regulations of the skin by using supportive lattice-like or woven structures around the shoulder for embedding the actuators. Another benefit of these structural designs is the distribution of pressure the actuators create on the limb and torso.