

Jamming is a useful mechanism for producing media of a variable stiffness, often seen in robotics applications for grasping complex and fragile objects. We investigated the use of jamming materials for medical applications, to support the upper arm and shoulder movement for rehabilitation. Our belief was that this approach could give patients variable support for the shoulder joint, to create a dynamic splint that provides immobilisation and support of the arm, replicating the isometric contraction required for holding a fixed position. Yet this device is elastic when released, allowing free unhindered movement when desired. In addition to this dynamic splint it could support smooth eccentric movement of the upper arm as it transitions into an un-jammed state, potentially in combination with actuators that emulate the concentric movements of muscles in the upper arm.
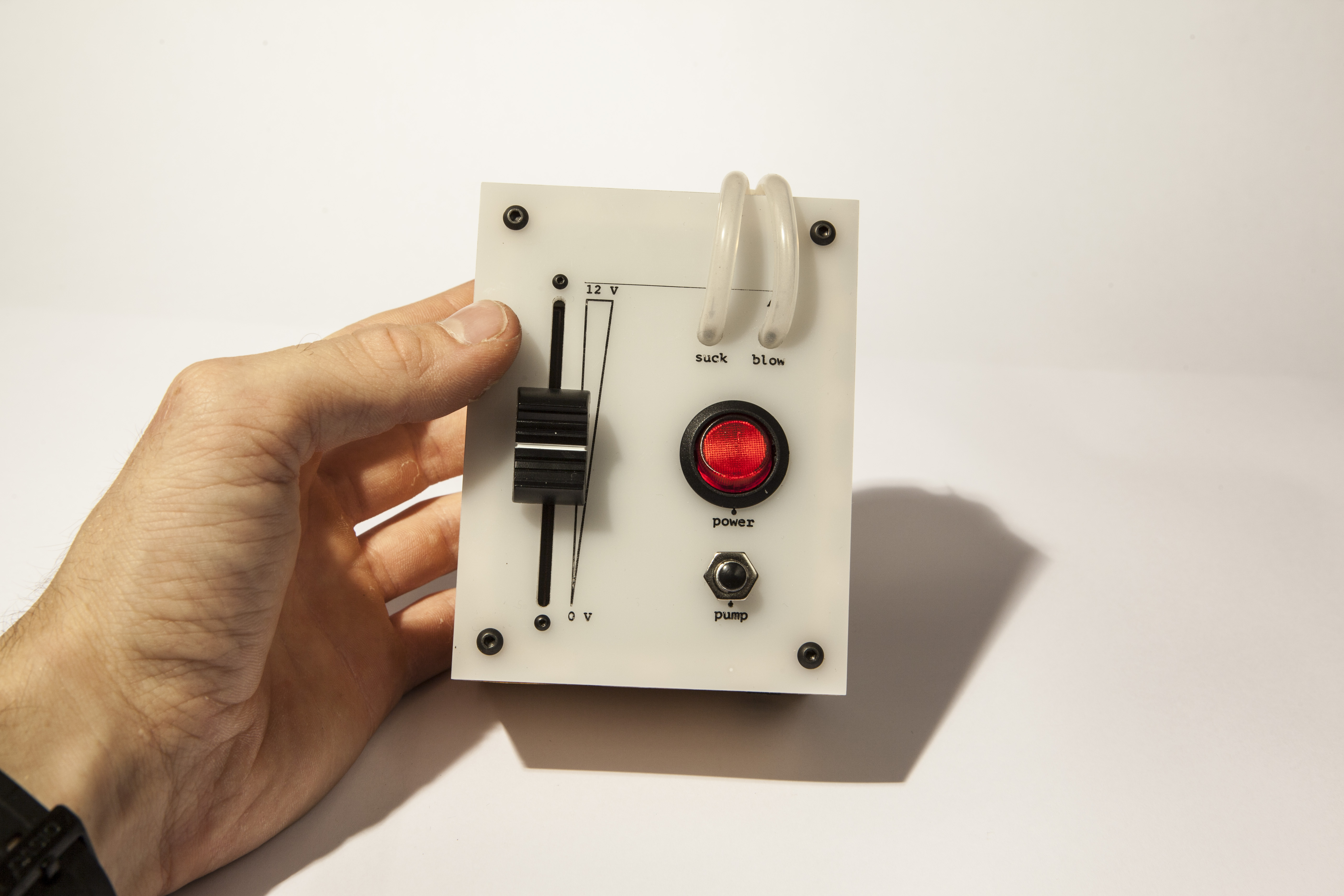
Granular Jamming describes a mechanism by which granular media can reversibly transition between fluid and solid like states. When the granular material can flow freely, the object feels soft and pliable. Tunable stiffness is achieved by applying and releasing a vacuum on the bladder enclosing the grains – forcing the grains to transition between states. This mechanism proved ideal for supporting movements at the shoulder due to its simplicity of construction, unlimited possibility for size and form and high degree of malleability. After the vacuum is generated the bladders valve can be sealed off to maintain the jammed state, so the vacuum pump only needs to run for short periods for efficient energy consumption.
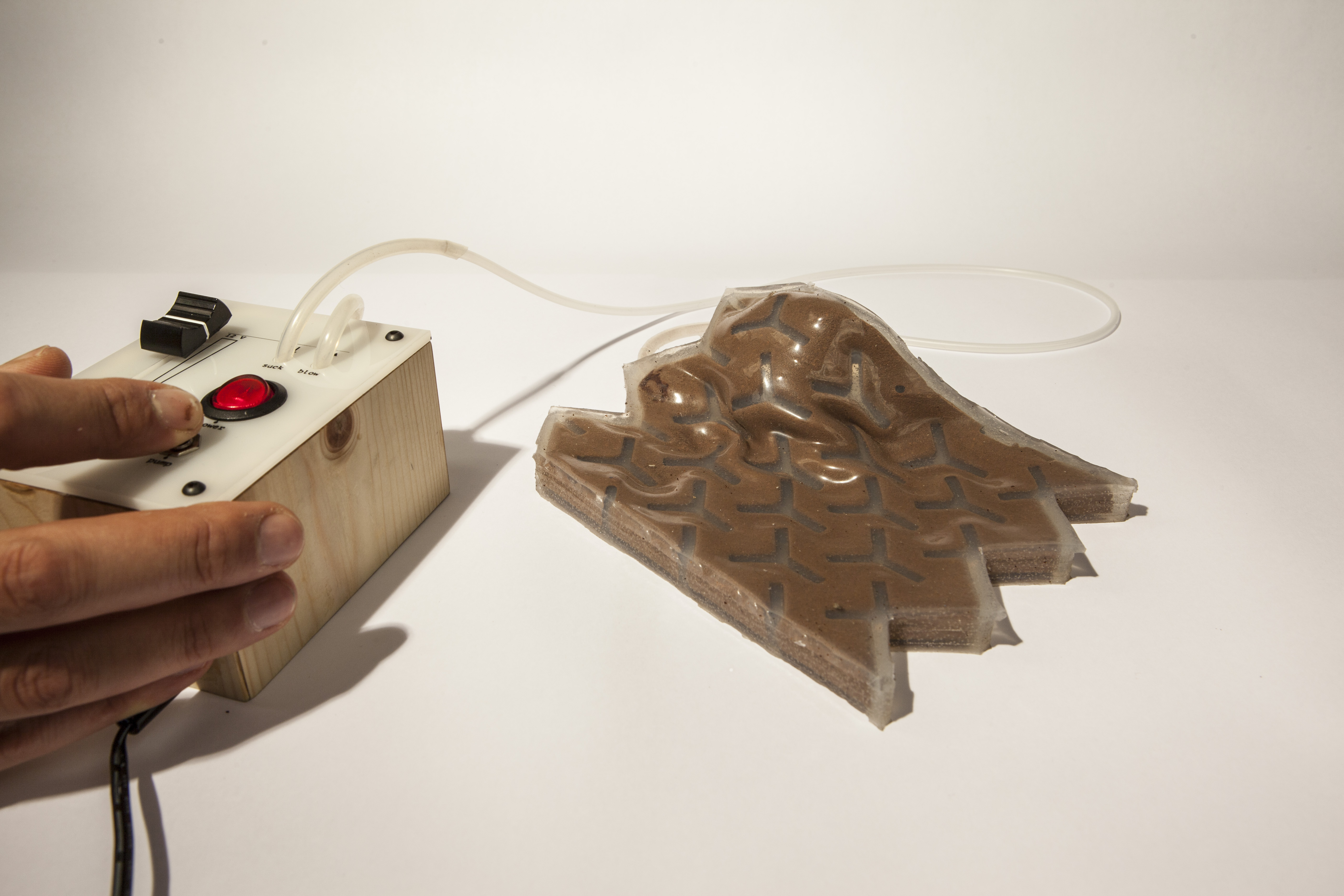
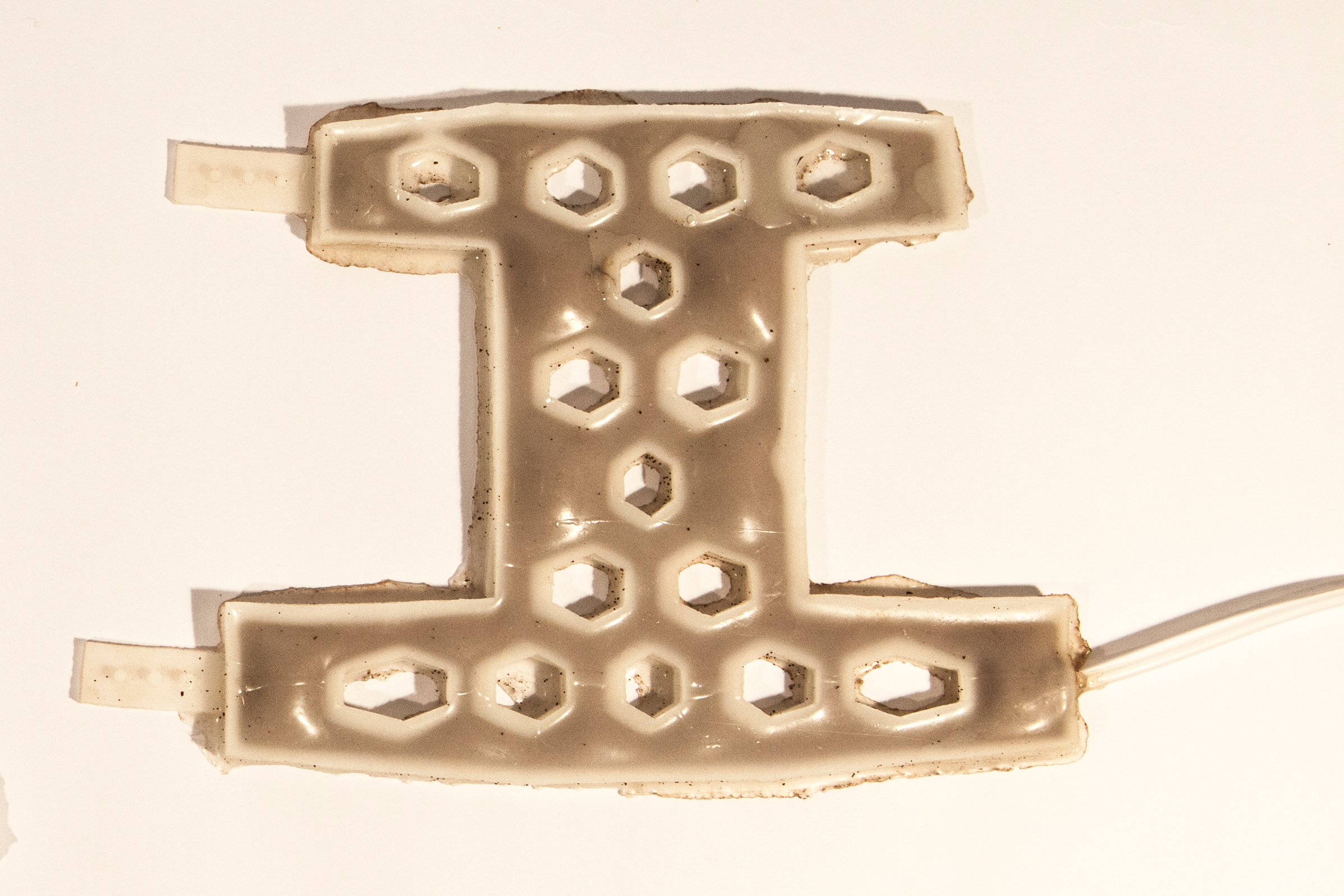
Our approach was to appropriate the silicone mould making techniques from Pneunets actuators to create highly stretchable bladders. We filled these bladders with ground coffee, and completed it with silicone tubing and air filter to encapsulate the grains. Jamming is then achieved by applying a vacuum on the silicone bladder, forcing the particles into a bonded and rigid state. We informally tested a small number of granular materials such as almond meal, flour, ground coconut and sand but we found ground coffee produced the most favourable combination of a large soft to rigid ratio, good rigidity and a fine surface structure on the resulting cast. The wealth of working examples using coffee grounds along with more formal material analysis in the literature also supports this finding.
One important characteristic of granular jamming we found through our work was the relative high resistance to stretching/elongation in the jammed state. This proved to be far greater than the flexural/bending resistance in the jammed state in terms of its practical application as a support for the shoulder joint. Given this, we found that the granular jamming media in this context was less applicable as splint and more analogous with a muscle in its behaviour, albeit ones that only provides eccentric and isometric contraction
An interesting phenomena was also exposed in our experiments with granular jamming. When coloured sand was used for jamming, there is a change in colour intensity between jammed and unjammed states. The silicone has a frosted surface from the moulding process, giving it a slightly opaque appearance. As this surface is drawn close to the particles during vacuum, the silicone becomes flush with the surface of the grains reducing the opacity. This colour change can be utilised as a visual feedback mechanism for active and passive states of the actuator.